


码垛机器人主要主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。在程序控制的条件下,通过传动方式,来实现执行机构的相应部位发生规定要求的,有顺序,有运动轨迹,有一定速度和时间的动作。
自动码垛机器人的控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能,运动机构,使手部完成各种转动、移动或运动来实现规定的动作,改变被抓持物件的位置和姿势。






在采用码垛机器人的时候,还要考虑一个重要的事情,就是机器人怎样抓住一个产品。 真空抓手是常见的机械臂臂端工具(EOAT)。相对来说,它们价格便宜,易于操作,而且能够有效装载大部分负载物。但是在一些特定的应用中,真空抓手也会遇到问题,例如表面多孔的基质,内容物为液体的软包装,或者表面不平整的包装等等。其他的EOAT选择包括翻盖式抓手,它能将一个袋子或者其他包装形式的两边夹住;叉子式抓手,它插入包装的底部来将包装提升起来;还有袋子式抓手,这是翻盖式和叉子式抓手的混合体,它的叉子部分能包裹住包装的底部和两边。将基本EOAT类型进行其他的组合也是可以的。一个饮料包装商在对装满瓶子,并且收缩裹包好的瓦楞托盘进行码垛时碰到了困难,真空吸盘会把托盘上的薄膜扯下来。


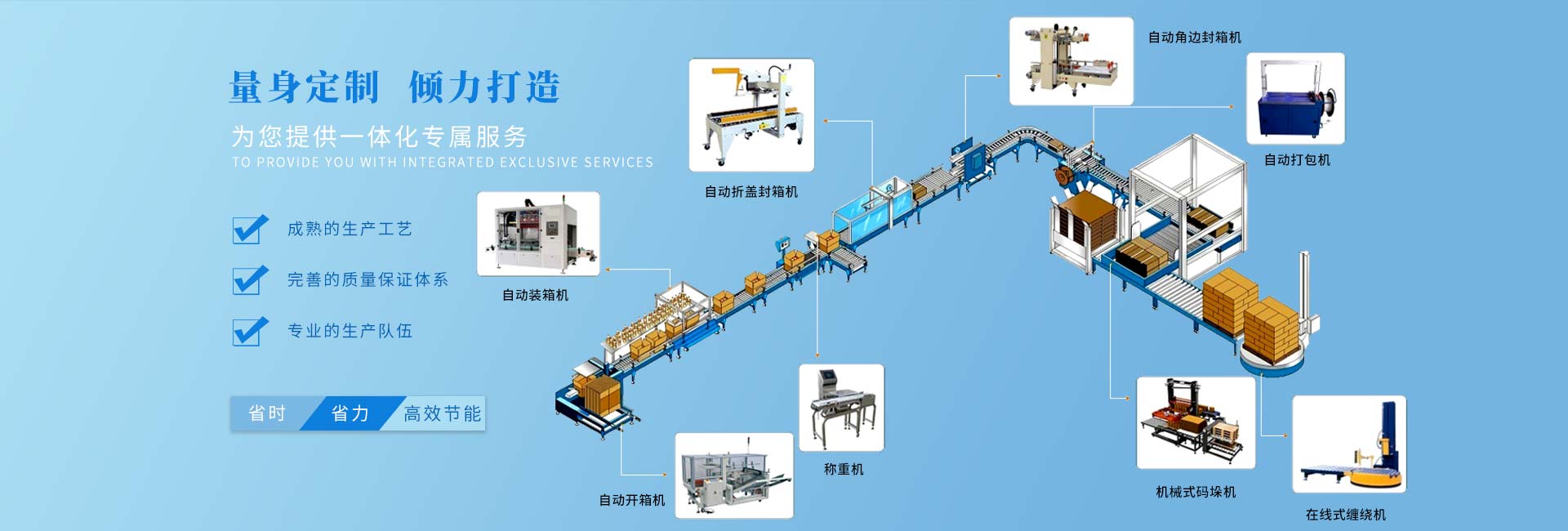
随着社会节奏的加快,很多生产厂家在生产线上也是越来越注重全自动化生产。这样不仅能很大程度的提高了生产效率,节省成本,还更规范了生产的操作流程,生产过程也更加的安全无污染。今天我们就是介绍这么一款可以无人操作的全自动码垛机,它可以实现无人码垛,全自动控制的码垛生产线-高位码垛机。
高位码垛机是可以码垛袋装、箱装、块状桶装物料的自动码垛。在个各行各业都得到了广泛的应用,全自动高位码垛机采用德国技术,故障率低,主机高度集成一体,采用伺服电机驱动,齿轮转动,结构简约耐用,自动上油保养维护,噪音低,控制准确,惰性多样化等特点,从自身结构的优势到工作中的优势都体现的恰到好处。
高位码垛机可以根据用户的需求来选择适合自己的码垛垛型。按照客户的需求来订制适合自己的全自动码垛机。
全自动高位码垛机的应用非常灵活,一机同时适应多种类型产品,一台全自动码垛机可以同时处理3条生产线的不同产品。产品更新时只需要输入新数据,重新计算后即可进行运行,无需硬件、设备上的改造与设置。垛型及码垛层数可任意设置,垛型整齐,方便储存及运输。
伺服电机控制转袋、定位、托盘升降、运行平稳、准确度高、噪音小,解决两款震动冲击问题,不再使用液压缸升降。



 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


